Комплект для изучения операционных систем реального времени и систем управления автономных мобильных роботов
Учебный комплект на базе TurtleBot3 Waffle Pi
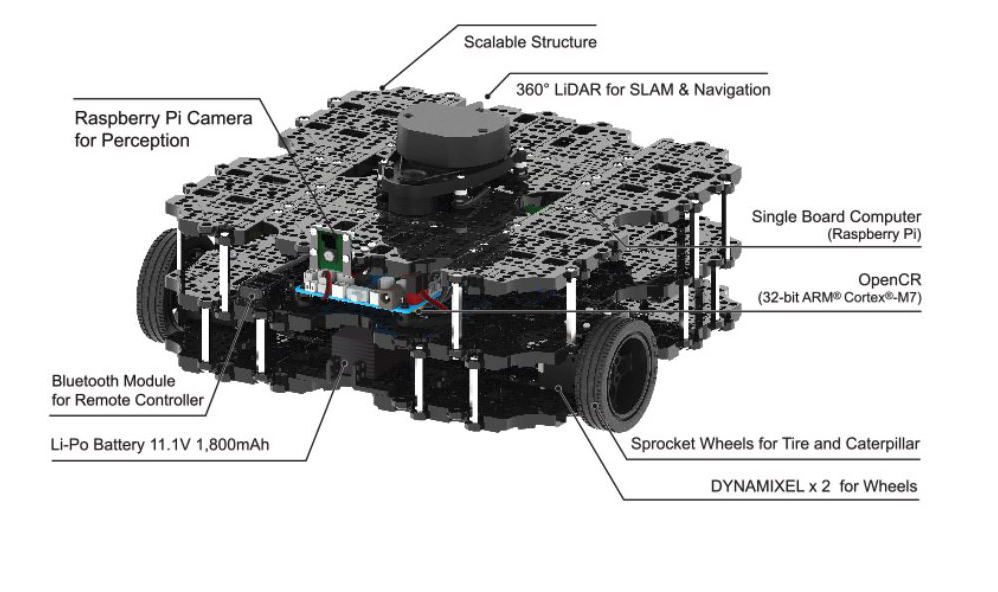
В состав комплекта входит мобильный робот TurtleBot3 Waffle Pi, программируемый одноплатный микрокомпьютер с интегрированным программным обеспечением для автономной навигации мобильных роботов и модуль стереозрения SVCam, представляющий собой модульное устройство на основе микрокомпьютера, периферийного контроллера и двух интегрированных модулей технического зрения.
Применение специализированного навигационного программно-аппаратного комплекса дает возможность учащимся приступить к разработке систем управления на начальном уровне подготовки, осуществляя настройку параметров системы управления в графическом редакторе и программирование робота в среде Arduino IDE. Система управления мобильного робота позволяет осуществлять анализ окружающей обстановки в процессе движения мобильного робота, формирование карты локальной обстановки вокруг робота и построение глобальной карты окружающего пространства, а также осуществлять анализ плана/карты окружающего пространства, обнаружение окружающих объектов, автономное планирование маршрута и объезда статических и динамических препятствий.
Программируемый одноплатный микрокомпьютер с интегрированным программным обеспечением для автономной навигации мобильных роботов представляет собой модульное микропроцессорное устройство с интегрированным алгоритмическим программным обеспечением, предназначенное для сбора и обработки сенсорных данных, используемых для разработки систем управления автономными мобильными роботами и транспортными средствами. Программируемый модуль обеспечивает: построение виртуального двухмерного или трехмерного плана окружающего пространства в автоматическом или ручном режиме; сохранение и редактирование пользователем плана окружающего пространства; локализация положения мобильного робота и окружающих объектов; планирование маршрутов между целевыми точками, заданными пользователем на плане; управление движением робота по заданному пользователем или расчетному маршруту; расчет маневров при движении робота по маршруту.